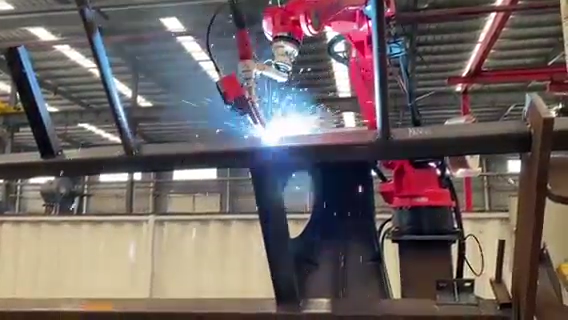
Tsement tanki avtomashina bazasini payvandlash Lazerli payvandlash bilan etti o'qli yer orbitasi sakkiz o'qli aylanish
- Ishlov beriladigan qismning joylashishi juda katta farq qiladi
- Ish qismini ulashda og'ish mavjud
- Yuqori payvandlash aniqligi talab qilinadi
- Yomon payvandlash muhiti va tutun
Bunday holda, Yooheart aqlli robot HY1006A-145 yuqori moslashuvchanlik, barqarorlik va ishonchlilikka ega bo'lgan lazerli payvandlash tikuvlarini kuzatish tizimi bilan payvandlash uchun ishlatiladi.
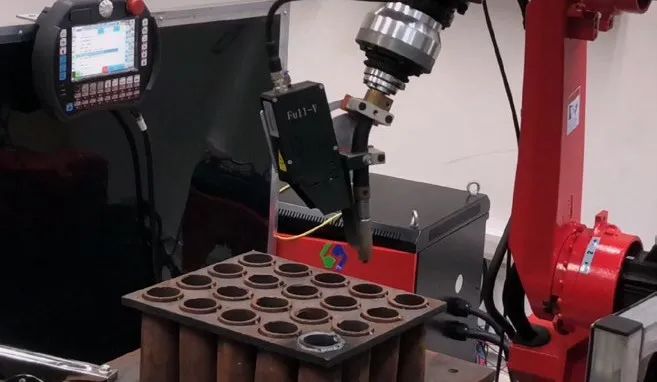
Har bir payvandlashdan oldin uskuna birinchi navbatda payvand chokining joylashuvi orqali payvand chokining koordinatasini skanerdan o'tkazadi va qayd qiladi, so'ngra ichki algoritm bo'yicha koordinatani hisoblab chiqadi va mahsulotning muhrlanishi va yaxlitligini ta'minlash uchun vaqtdagi haqiqiy og'ishlarni tuzatish uchun mos yozuvlar koordinata parametrlarini haqiqiy vaqtga qo'yadi.
"To'rt nuqtali kesishish" usuli

Lazerli tikuvlarni kuzatish tizimi
Gofrirovka qilingan plastinka eritmasi

Dumaloq teshikli avtomatik vilka payvandlash eritmasi

Dumaloq tikuv eritmasi

Quvur plitalari yechimlari
Xabar vaqti: 2022 yil 09 aprel



